Studentski radovi 2023.
CATch Cafe
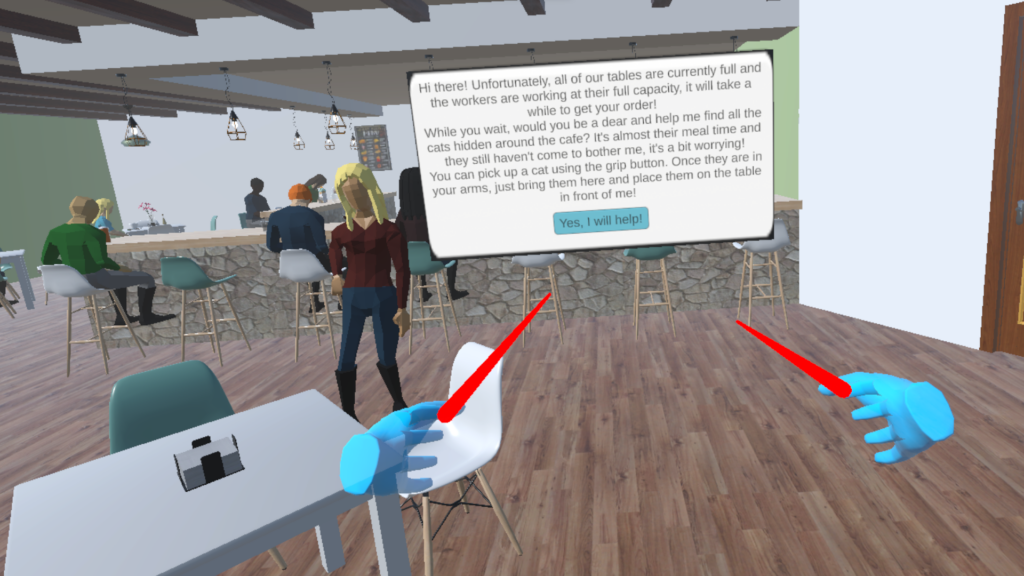
CATch Cafe Autorica: Emilia Haramina CATch Cafe igra je u virtualnoj stvarnosti razvijena na FER-u u okviru Završnog rada. Radi se o “Cat Cafe-u”, kafiću s mačkama, u kojem igrač mora pronaći svih devet skrivenih mačaka, svaki puta na drugim mjestima. Može se igrati na jednokorisnički ili višekorisnički način, a za višekorisnički način postoje dvije [...]
EKG i EMG pojačalo
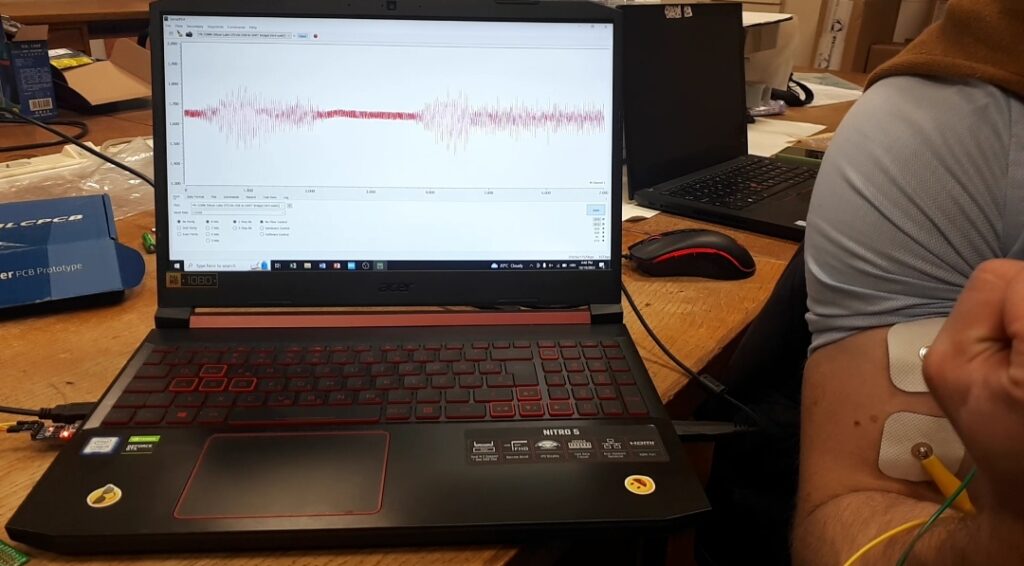
EKG i EMG pojačalo Autori: Matea Čunović, Matea Vnučec, Tin Vranaričić Upotreba biomedicinske instrumentacije u otkrivanju potencijalnih komplikacija u radu ljudskog organizma u velikom je porastu, a primjer su toga upravo uređaji za mjerenje EKG i EMG signala. EKG ili elektrokardiograf grafički je zapis električnog potencijala srca. Sastoji se od P vala, QRS kompleksa i T [...]

JuiciFER Extreme
JuiciFER Extreme Autori: Marija Milanović, Majda Bakmaz, Antun Hemetek, Petar Jakuš, Marko Srpak i Marta Kekez Društvena igra JuiciFER Extreme osmišljena je kako bismo spojili tehnologiju mikrokontrolera i klasičnu igru pogađanja rupa lopticama. Kompletnom igrom se upravlja pomoću mikrokontrolera STM32F429 discovery na kojemu se koristi postojeći LCD zaslon za praćenje tijeka igre, dok su ostale komponente [...]
Pažnjobot
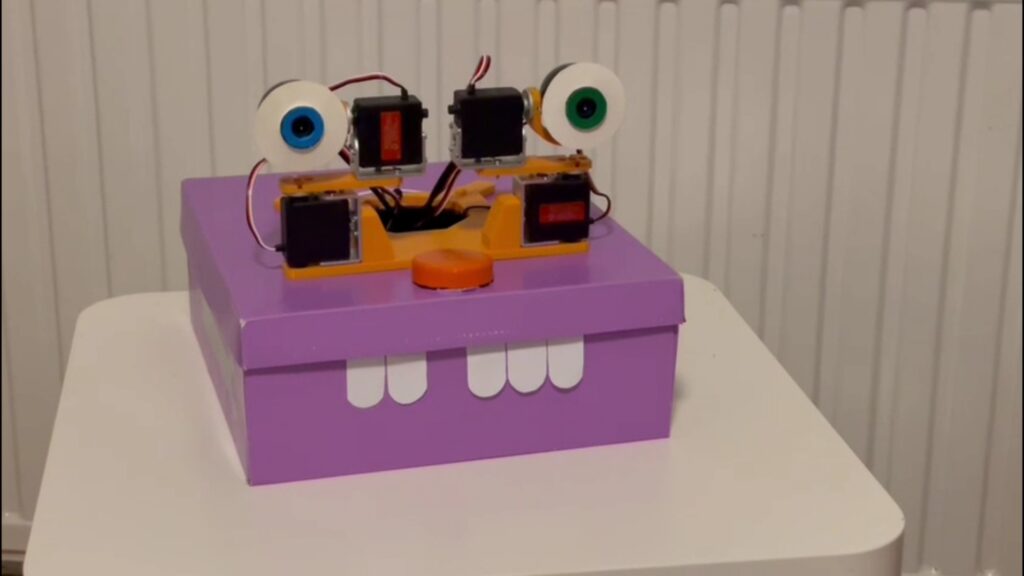
Pažnjobot Autor: Tin Mišić Ovaj rad nadograđuje na rad predan za rektorovu nagradu u ak. god. 2022./2023. („Praćenje objekata aktivnim stereo vizualnim sustavom“), pod mentorstvom prof. dr. sc. Ivana Markovića i Karla Koledića, mag. ing.„Pažnjobot“ je binokularni robot koji prati lice određene osobe na koju se fokusira, time obraćajući pažnju na njih i ignorirajući pozadinu [...]

Prava vrećica
Prava vrećica Autori: Jura Hostić, Tvrtko Puškarić, Karlo Vrdoljak Mobilna aplikacija Prava Vrećica je alat koji pomaže pri pravilnom razvrstavanju i odlaganju otpada. Rad aplikacije se temelji na prepoznavanju različitih objekata pomoću računalnog vida, modelom umjetne inteligencije EfficientDet. Prepoznati otpad kategorizira se na temelju službenih pravila reciklaže i odlaganja otpada koja pružaju zadužene organizacije na [...]
Robotics@FER
Robotics@FER Skupinu robotics@fer čine tri laboratorija s FER-a: Laboratorij za podvodne sustave i tehnologije (LABUST), Laboratorij za autonomne sustave i mobilnu robotiku (LAMOR) te Laboratorij za robotiku i inteligentne sustave upravljanja (LARICS). Na LABUST štandu posjetitelji će moći isprobati teleoperaciju podvodne ronilice. Daljinski upravljana ronilica Blueye PRO nalazit će se u bazenu LABUST laboratorija (dvorana [...]